")

Research Projects
 |
Creating 5D models of multi-floor buildings with thermal-digitalisation mobile platforms. PID2019-108271RB-C31 (2020-2023) |
This project is a continuation of the National Project DPI2016-76380-R, entitled "Thermal BIM", in which a research Line on 3D Thermal Vision in Buildings was started. The contributions of this new project with respect to previous projects, are summarized in the following points. 1) The creation of an autonomous and mobile sensory system that captures clouds of omnidirectional thermal points up to building level and at different times. It will be a system that completes the few current proposals for non-temporary systems. In previous projects, an autonomous platform has been used with non-omnidirectional data and at the level of a room or group of rooms. 2) The generation of the 5D semantic model (XYZ+T+t), which represents a new data structure, not yet known in related literature. In previous projects, static thermal point models have been generated, not semantic or temporal models. In addition, work has been done mainly at the level of room or group of rooms.
 |
5D sensory system in BIM environments for characterization and energy analysis of buildings: Applications in the architectural heritage of ITI areas of Castilla La Mancha. SBPLY/19/180501/000094 (2020-2023) |
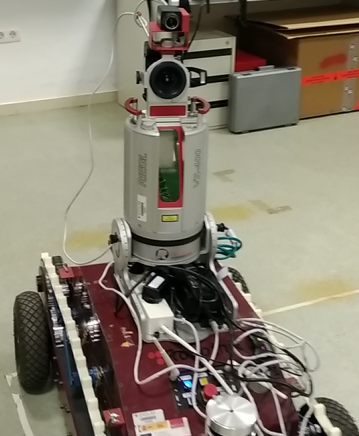
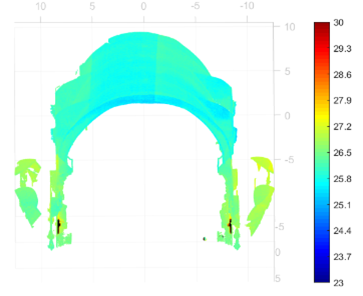
The first objective consists on developing a 3D Thermal Panoramic Scanner (TPS) system, which integrates a long-range laser scanner and a panoramic thermal camera. The goal is to take [0,360º] x [-90º, 90º] panoramic sweep samples, so that a unique 4D thermal model of the entire visible environment is obtained. The second objective is focussed on creating an autonomous system that repetitively perform thermal scans of the same scene from predefined positions, generating 5D models. The third objective is to test the feasibility of this technology in the energy characterization of traditional buildings. A representative set of buildings of the architectural heritage from different areas will be selected beforehand. Test will be conducted in order to justify the cultural and environmental value underlying vernacular architecture of Castilla La Mancha. The goal is to evaluate energy saving actions and to asses the rehabilitation and maintenance expenses specifically in historic or residential buildings. This objective follows the Castilla La Mancha's guidelines on internal actions that reinforce economic, social and territorial cohesion, reducing the differences between the levels of development of the various regions of the community
 |
 |
 |
|
TBIM . Thermal BIM: Automatic creation and monitoring of thermal BIM models of building indoors. DPI2016-76380-R (2017-2019) |
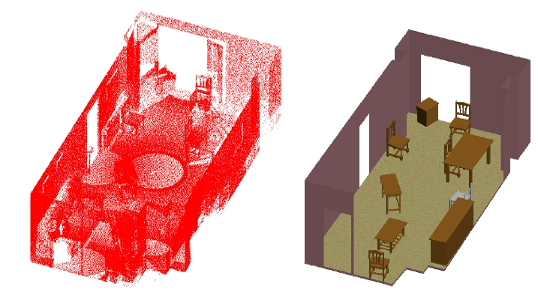
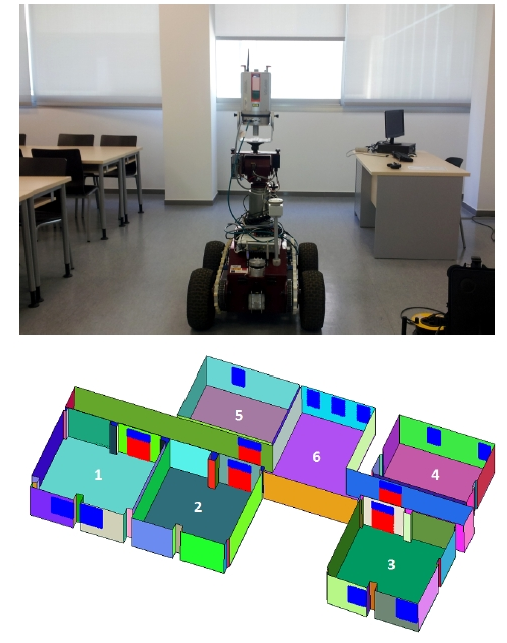
The first objective aims to develop a hybrid 3D laser scanner/colour-camera/thermal-camera system that provides point clouds with both colour and thermal information (i.e. temperature) inserted on them. Scan planning algorithms proposed in earlier projects will be adapted for point clouds with geometric and temperature information. Thus, a new next-best-thermal-scan (NBTS) proposal will be developed throughout the project. Optimizing and automating the NBTS process will yield evident advantages in the 3D digitization field. The second objective focuses on developing a set of techniques for the automatic creation of three dimensional geometric + colour + temperature semantic simplified building indoor models. This is an interesting and novel matter on which few researchers are currently working. The project will focus on building indoors. Obtaining the as-built model of such environments will require combining 3D data and 2D image processing for recognition and positioning of structural components of the building like walls, floors, columns and ceilings, as well as other important elements such as windows and doors. The third objective concerns monitoring and tracking the TBIM over time, which will require the development of a tool for visually and computationally compare TBIMs created at different times. This kind of tools would be extremely useful for assessing changes in energy efficiency, for detection of leak of energy through specific zones of the building and for making decisions about building maintenance tasks. Thus, the temporal interpretation of the thermal data (mapped onto the BIM objects) to support a survey analysis is a challenging matter that might yield meaningful research results

|
3D scanners integration and automatic modeling. PE-2014-017-P (2014-2017) |
The main objective of the project is to develop integration techniques for 3D digitalization technologies with multiple resolution requirements and to develop automatic modeling algorithms for large dimension environment.
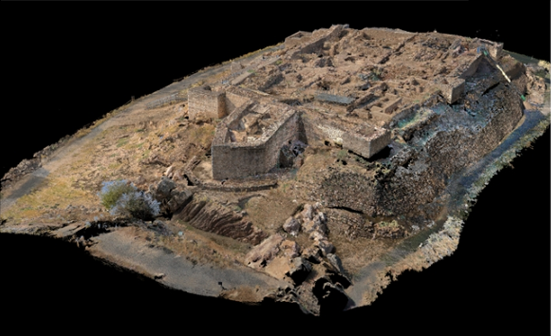
In areas with large dimensions, interior (museums, churches, palaces) as well as exterior spaces (archaeological parks, buildings, facades, etc.) require the segmentation of data acquired on range images and the fusion of segmented models to generate a complete model. Obtaining a complete digitalization of the target is therefore tantamount to the difficulty in integrating the various zones in which each one must be acquired with a different device according to the geometric and colorimetric characteristics of the parts.
The second objective concerns the 3D data processing. Particularly our goal is to generate Building Information Models (BIM) using the data coming from the 3D sensor. In this point there are two research lines. The first line will be focused on developing particular software which is able to deal with the cloud of points and generate manually CAD models. The second line is to automatically identify essential parts of a building by using range data under clutter and occlusion circumstances. This is one of the challenging targets in the field of automatic BIMs.
 |
AutoBIM - Automatic Reconstruction of Building Information Models From Multiple Laser Scanners. DPI2013-43344-R (2014-2016) |
This project is framed in both 3D digitization and 3D data intelligent processing research fields.
The first objective is focused on developing a set of techniques for the automatic creation of three dimensional semantic simplified building models. Semantically rich 3D information models (called building information models (BIMs)) are increasingly used throughout a facility's life cycle for diverse applications in the architecture, engineering and construction domains. This project aims to obtain algorithms to automatically convert millions of raw 3D point data from the laser scanners positioned at multiple locations into BIM model; a process known as scan-to-BIM".
The second objective is addressed towards the intelligence acquisition of the data. In the data acquisition stage the scanner operator usually decides the number and locations of the scanner which made highly inefficient this process. The quality and the information of the scene are incomplete. Optimizing this process therefore will yield evident advantages in the 3D digitization field.
The third goal is to carry out useful technological transference to the society. We are encouraged to demonstrate the real application of this research and to test how these technologies can be beneficial to companies and society.
|
Integration of 3D Digitalization Technologies in multidimensional environments. Application on large dimension historical-artistic heritage spaces. DPI2009-14024-C02-01. (2010-2012) |
In this project we endeavored to effectively combine the three digitalization technologies: laser technologies based on vision, laser technologies based on phase change and structured light technologies. The various range and resolution capabilities of the sensors, as well as how they perform when faced with external factors like errors produced by bright light or shadows, sensitivity to external illumination or material reflectivity allowed for the attainment of high-quality results in these heterogeneous and multidimensional environments. Consequently, this research raised such a challenge that it has scarcely been undertaken by researchers in Spain.
The second objective concerned the coupling of tridimensional volumes to generate original models and to achieve a connection with enlarged reality systems. This problem, that has a direct application in the reconstruction of archaeological zones of demolished spaces, was undertaken from the perspective of recognition and positioning over parts of the objects. It was a problem that was not easily solved and has hardly been dealt with among international circles...

|
Laser Technology for 3D Large Surface Digitalization. PCI08-0052 (2008-2010) |
New registration and reconstruction approaches had to be adapted to the new laser 3D technology. The project was focused in this point on developing a set of techniques capable of obtaining the complete 3D digitalization (geometry+texture) of large objects by using a top-down architecture with the different laser scanners. This goal involved special research in 3D image processing due to the vast volume of information 3D and the complexity of the integration of a high number of registries. The digitalization had to be complete in the following contexts: geometrical, textural, information storage and physical reproduction. Among other aspects of the research, the following ones stood out: the optimal capture of views, the election of optimal points of view, the construction of algorithms for the automatic registration/merging of surfaces/views, the generation of algorithms of mesh closing and hole detection/filling.
Likewise an important line was concerned with the generation, treatment and fusion of textures on the model. These techniques were applied over invaluable large dimensions heritage pieces and the results have been handed over to institutions through of the models and their physical reproductions.
|
Shape Recognition and Intelligence Coupling of 3D Parts. Applications to big sculpture pieces. DPI2006-14794-C02-01. (2007-2009) |
The main goal of the project referred to the area of recognition and merging of three-dimensional objects. Thus efficient algorithms had to be created in order to achieve the resolution of 3D puzzles which could be complete or incomplete. This problem, which has a direct application in the reconstruction of antique archaeological or sculptural objects, was attempted from the perspective of the techniques of recognition and positioning of parts of the objects. It was a hard problem which has been rarely undertaken in national or international forums.
With the aim of showing the real application and evaluating the benefits that this technique can provide, a collaboration agreement was established with Roman Art National Museum (Merida, Spain). These techniques were applied over invaluable sculptural sets of large dimensions (volumes of around 2mx1mx3m) as well as on sculptures which were only a group of unconnected pieces to obtain a synthetic reconstruction of the original object. Finally the obtained results were handed over to this institution through a management and visualization tool of the models and their physical model.

|
RRV-3D - 3D Virtual restoration of cultural heritage pieces. PBI05-028. (2005-2007) |
The goal of this project was to develop a set of techniques for 3D reconstruction and restoration of heritage pieces. Motivation in this project was double. First, valuable original shapes could be virtually recovered, and second, virtual reality technologies were introduced in our region. Furthermore, both aspects could be considered pioneer in Castilla La Mancha region.
The research of the project was focused on 3D image processing and artificial intelligence areas. Specifically, the main contribution in 3D restoration was based on establishing data and texture matching algorithms. On the other hand, an expert system of automatic restoration solutions was inserted in the developed system. To complete this work several virtual reality technologies and systems were used after generating the reconstructed models. The systems were: laser scanner system for high resolution digitalization, passive and active stereo projection systems for visualization and augmented reality and haptic devices for virtual immersion.

|
REVI3D - Design, development and application of techniques for reconstruction and visualization of complex 3d scenes sensed with range finder sensors (revi3d). CICYT. DPI2002-03999-C02-01 (2003-2005) |
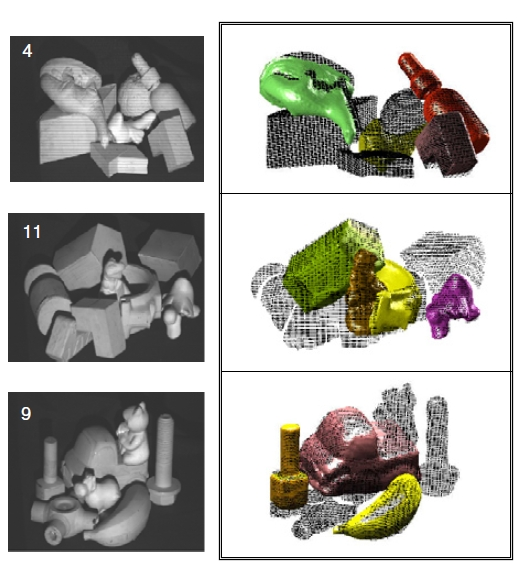
This project coped with the management of complex 3D scenes sensed by range finder sensors. Different free-form objects located at arbitrary poses in the scene, where occlusion phenomena can appear, form this kind of scenes. The scene was sensed from a single point of view and therefore only partial information of it was available. The project was an extension of a previous one carried out by the same research team. Previous works were dedicated to deal with isolated objects, being this project the natural extension of these research activities.
The proposed objectives were arranged in several stages. Firstly, new 3D segmentation techniques were developed in order to separate the objects that compose the scene. Then, new object recognition and object localization techniques had to be developed with the purpose of reconstructing the scene. Methods based on object models extracted from partial range data views were used in this case. A technological application were built on top of the obtained research results. A virtual environment of the scene and a virtual manipulator were developed. Different grasping strategies were simulated in this environment, allowing the selection of the most adequate. Finally, a platform including a real manipulator and a range sensor were constructed with the aim of testing the planned grasping strategies.
|
SIPMAN - Biometric Verification/Identification Based on Hands Natural Layout. PBI-02-008 (2002-2004) |
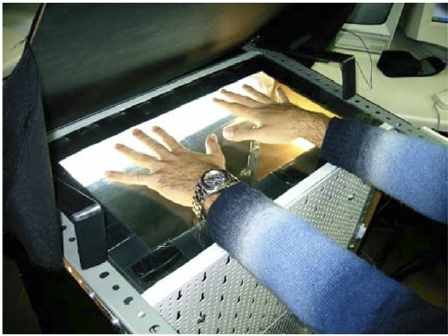
This project was framed in the general approach of computer vision, specifically in biometric methods for personal identification. In this environment, the specific objective of the project was focused on defining robust hand features through artificial intelligence techniques and image processing. The goal was to establish sure personal codes when both hands are used. Therefore several stereo algorithms could be reviewed in this false stereo problem. So far only one hand had been used in personal identification problems, so scientist objective of this project involved a meaningful advance with regard to other techniques.
In order to obtain this objective, a personal-identification device based on computer vision had to be developed. For that, we established two sequential steps. First, an extensive study and test were performed in laboratory using an experimental setup. In this phase, the identification procedure had to be refined before carry out the next phase. In the second step, a portable device were built in order to accomplish a wide test of the system outside. Finally, results and conclusion were performed. This task involved a technological contribution of the project.
|
MOOBDIN - Three-dimensional data acquisition based on structured light colour for dynamics objects. Applications to robot manipulator interactions. CICYT, DPI 2001-0986 (2002-2004) |
This project was framed in the general approach of computer vision, specifically in geometric modeling from tridimensional information. The scientific objective of the project was focused on geometric dynamic modeling when tridimensional data come from structured light colour projection techniques. Therefore, deformable objects or changing objects were considered.
In order to obtain this objective, a new and fast technique for recovering three-dimensional information based on structured light colour had to be designed. Deformable modeling techniques were studied and a specific model were developed according to the data come from the sensor. Moreover, a simulation and visualization software tool were developed in this project to carry out a whole study of the problem.
So far geometric modeling for static shapes using both gray range finders and stereovision techniques had been used in our research. Therefore the objective of this project involved a meaningful advance with regard to static modeling techniques.
From a technological point of view and as application, a link of the 3D sensing system and a robot manipulator was considered. The general idea was that the robot manipulator had to be able to make interactions in the dynamic scene. In this sense, a set of increasing difficult actions were established.