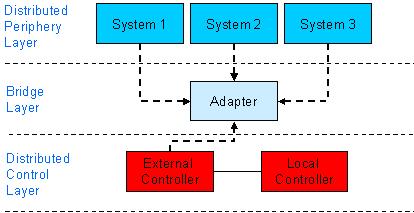





TESIS DOCTORAL (3)ARQUITECTURAS EN TIEMPO REALCon el fin de integrar una celda experimental basada en un robot manipulador con un sistema de visión 3D, y de aportar soluciones en el ámbito de los middlewares robóticos, se ha propuesto en esta tesis doctoral una nueva arquitectura o framework de integración. Esta arquitectura esta basada en tres niveles siguiendo una equivalencia con el patrón half-sync / half-async:
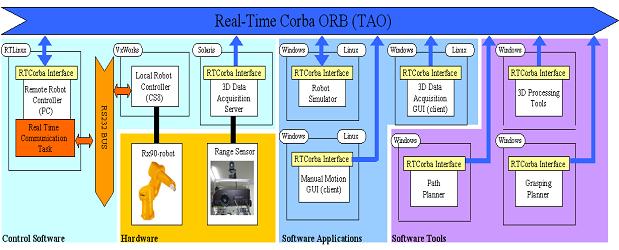
Para la implementacion de esta arquitectura se han utilizado tecnologias de tiempo real tales como:
|
|