")

Trabajos de Investigación
 |
Creación de modelos 5D de edificios multi-planta utilizando plataformas móviles de digitalización térmica. PID2019-108271RB-C31 (2020-2023) |
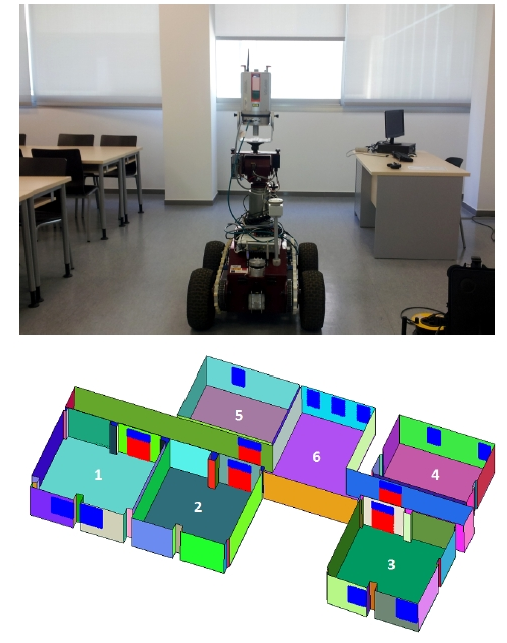
El proyecto presentado es continuación del anterior proyecto nacional DPI2016-76380-R, en el que se han sentado las bases de la obtención de mapas térmicos en tres dimensiones de interiores. Las aportaciones de este nuevo proyecto respecto a proyectos anteriores, quedan sintetizado en los siguientes puntos. 1) La creación de una plataforma móvil autónoma que capta nubes de puntos omnidireccionales térmicas hasta nivel de edificio y en distintos tiempos. Será un sistema que completa las escasas propuestas actuales de sistemas no temporales. En proyectos anteriores se ha utilizado una plataforma autónoma con datos no-omnidireccionales y a nivel de habitación o grupo de habitaciones. 2) La generación del modelo semánticos 5D (XYZ+T+t) de edificios completos, lo que supone una nueva estructura de datos, aún no conocida en la literatura relacionada.
 |
Sistema sensorial 5D en entornos BIM para caracterización y análisis energético de edificios: Aplicaciones en el patrimonio arquitectónico de zonas ITI de Casilla-La Mancha. SBPLY/19/180501/000094 (2020-2023) |
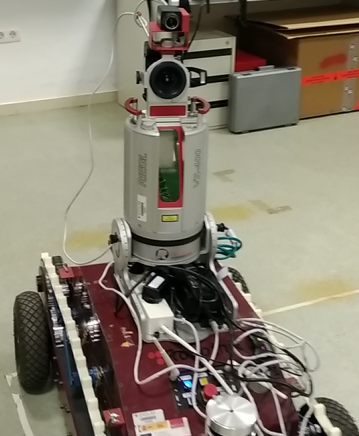
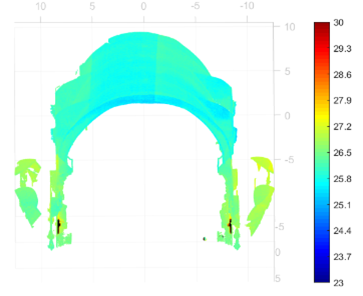
El primer objetivo se centra en desarrollar un sistema sensorial 3D TPS (Thermal Panoramic Scanner) que integre un sensor láser de largo alcance con una cámara térmica panorámica, de forma que realice un barrido panorámico ([0,360º] en horizontal, [-90º,90º] en vertical). Este sistema generará un modelo 4D (XYZ+T) térmico de puntos que registre térmicamente el entorno visible desde una posición del escáner, superando así a los actuales modelos parciales y de reducido campo de vista. El segundo objetivo consiste en generar modelos repetidos 4D en el tiempo para generar un modelo 5D de forma autónoma. El tercer objetivo es aplicar la tecnología desarrollada en edificios característicos de la arquitectura vernácula de la región, con construcción tradicional y ubicados en zonas ITI (Inversión Territorial Integrada) de Castilla La Mancha (CLM). Se persigue logar una caracterización energética mediante modelos 5D de un conjunto representativo de edificios de este patrimonio arquitectónico, justificando el valor cultural y medioambiental de su mantenimiento o rehabilitación.
 |
 |
 |
|
TBIM: BIM térmicos: Creación automática y monitorización de modelos tridimensionales térmicos en interiores de edificios. DPI2016-76380-R (2017-2019) |
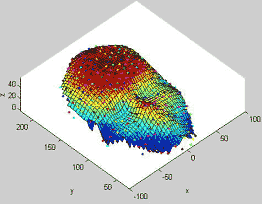
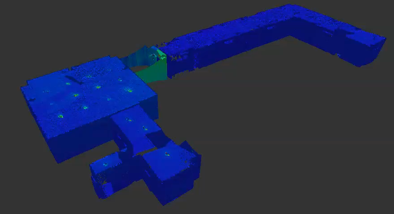
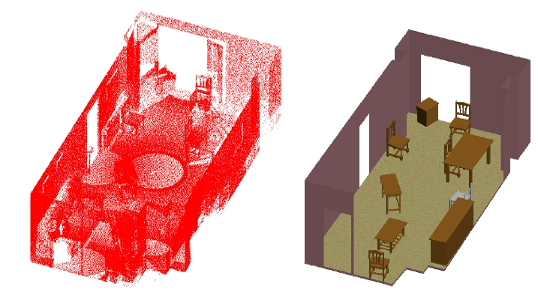
El primer objetivo se centra en el desarrollo de un sistema híbrido láser-escáner/cámara-RGB/cámara-térmica que proporcione nubes de puntos con información de temperatura y color. Por otra parte, se pretende adaptar algoritmos de Mejor Siguiente Scan, desarrollados en proyectos anteriores, parea conseguir el Mejor Próximo Scan Térmico (Next Best Thermal Scan). El segundo objetivo trata de desarrollar técnicas de procesamiento de nubes de puntos geometría+color+temperatura para creación automática de modelos tridimensionales térmicos de la estructura de interiores de edificios. La generación automática de modelos 3D térmicos (Thermal-BIM o TBIM) con escáner 3D de largo rango, es una línea de investigación de futuro y puntera, con gran demanda en ingeniería, construcción y arquitectura para estudiar la eficiencia energética en edificios. Para generar el modelo geométrico, se desarrollarán técnicas de segmentación de nubes de puntos, reconocimiento y posicionamiento 3D de las estructuras fundamentales de la edificación: paredes, suelo, techo, columnas, puertas y ventanas. Este proceso, llamado TScan-to-TBIM, generará un modelo térmico de la estructura del edificio de forma automática. El tercer objetivo se centra en la monitorización o seguimiento de modelos TBIM en el tiempo. Esto supondrá desarrollar herramientas de visualización y comparación de modelos TBIM para diferentes etapas de reparación o subsanación del edificio con el objetivo de aumentar su eficiencia térmica. El proceso de comparación se denomina TBIM-to-TBIM en nomenclatura científica. Esta es una aplicación puntera y desconocida hasta ahora que podría ser de gran utilidad en el entorno de la construcción en cuanto a evaluación de pérdida energética y ayuda en toma de decisiones.

|
Integración sensorial con escáners 3D y generación automática de modelos. PE-2014-017-P (2014-2017) |
El objetivo de este proyecto se centra en el desarrollo de técnicas para la creación automática de modelos tridimensionales semánticos simplificados en entornos de edificaciones y construcciones en general. Se trata de realizar una tarea de ingeniería inversa inteligente sobre entornos desconocidos, con características de desorden y oclusión. La generación automática de modelos de información de edificaciones (BIM: Building Information Models) en entornos desestructurados mediante escáner 3D de larga distancia es una línea de investigación puntera en la que muy pocos grupos en el mundo están trabajando actualmente y muy demandada en ingeniería, construcción y arquitectura. Los aspectos científicos relevantes en este objetivo son: segmentación de datos 3D, reconocimiento y clasificación 3D con oclussion, creación del modelo semántico y restauración de edificaciones. El producto de salida será un modelo del entorno digitalizado que contenga información de al menos: el tipo de elemento reconocido, su geometría y su posición en el entorno.
 |
Automatización en procesos de digitalización 3D de edificaciones con escáneres. DPI2013-43344-R (2014-2016) |
El presente proyecto se centra en el desarrollo de algoritmos inteligentes para la toma eficiente de datos, registro de vistas y eliminación de zonas sin interés. Se trata pues de desarrollar algoritmos de automatización en la toma de datos con escanners. Hasta ahora el proceso de toma de datos para digitalización 3D (tanto para objetos, como para grandes espacios) con escanners se realiza manualmente y siguiendo un plan a voluntad del operario del escáner. Esto se traduce en un registro de datos ineficiente en el tiempo y en los resultados, lo que lleva muchas veces a tomas innecesarias desde posiciones erróneas. Optimizar este proceso es un aspecto escasamente acometido en la literatura y sería de gran utilidad para cualquier proceso de digitalización. Los algoritmos que resuelven este problema se denominan en la literatura especializada algoritmos de Mejor Próxima Vista, o Next Best View(NBV) en su denominación anglosajona. Pero el objetivo de este proyecto va un poco más allá. No tiene sentido trabajar en NBV si no es para hacer reconstrucciones 3D de escenas. Por ello, además se investigará en procedimientos de registro automático y solapamiento de datos 3D obtenidos con láser escáner; y en el etiquetado de datos que no son de interés en la reconstrucción (clutter). Se pretende implementar el procedimiento en un robot móvil que porta una plataforma con tres grados de libertad en la que puede ser asentado el laser escáner.
|
Fusión de tecnologías de digitalización 3D. DPI2009-14024-C02-01. (2010-2012) |
El objetivo central del proyecto es desarrollar técnicas de integración de tecnologías de digitalización 3D en entornos con requerimientos de multiple resolución. En espacios de actuación de gran dimensión, tanto interiores (museos, iglesias, palacios, ) como exteriores (parques arqueológicos, edificios, fachadas, etc), se requieren procesos de segmentación de datos y fusión de modelos segmentados. Por lo tanto, el problema de digitalización completa se convierte en un problema de integracíón de partes/zonas, donde cada una de ellas debe ser adquirida con una tecnología distinta en función de las propias características geométricas y colorimétricas del segmento. En este marco, se fusionan tres tecnologias de digitalización: tecnologías láser por visión, tecnologías laser por cambio de fase y tecnologías de tiempo de vuelo. El diferente rango de alcance y resolución de los sensores, asi cómo su diferente comportamiento frente a agentes externos - como errores ante brillo o sombras, sensibilidad a iluminación externa o reflectividad del material - permitirá conseguir resultados de alta calidad en estos entornos hetereogéneos y multidimensionales.

|
Tecnologías láser para digitalización 3D de grandes espacios. PCI08-0052(2008-2010) |
El este proyecto se desarrollan técnicas de registro y reconstrucción geométrica adaptados a grandes volúmenes de datos así como se establecen sistemas de visualización e inmersión sobre las geometrías reconstruidas. En este punto se incluye un componente en investigación sobre tratamiento y fusión de geometrías y texturas para reproducción exacta de entornos reales. La digitalización deberá ser completa en el sentido geométrico, textural, de almacenamiento de la información y de reproducción física. Por lo tanto, se trata de asentar y ampliar las técnicas de registro y reconstrucción geométrica así como completar y ampliar las posibilidades de herramientas de restauración virtual. La digitalización se realiza en exteriores: fachadas, monumentos, conjuntos históricos y arqueológicos, e interiores: reconstrucción de salas, naves y cuevas.
|
Técnicas de digitalización completa 3D para piezas complejas de gran dimensión. Reconocimiento de formas e integración inteligente de partes 3D. DPI2006-14794-C02-01. (2007-2009) |
El objetivo novedoso de este proyecto concierne al campo de reconocimiento y acoplamiento de formas tridimensionales. Se trata de generar algoritmos eficientes para la resolución de puzzles 3D que podrán ser completos o incompletos. Este problema, que tiene una aplicación directa en la reconstrucción de piezas arqueológicas o escultóricas de gran antigüedad, será acometido desde la perspectiva de técnicas de reconocimiento y posicionamiento sobre partes de objetos. Se trata de un problema de difícil solución que es escasamente tratado en ámbitos nacionales e internacionales. La aportación de inteligencia artificial del presente trabajo descansa en la capacidad del sistema para reconstruir partes ausentes o restaurar partes deterioradas. En este sentido se trata de instalar un sistema experto capaz de sugerir soluciones al usuario.

|
Técnicas de reconstrucción y restauración virtual 3d de piezas de patrimonio cultural. PBI05-028. (2005-2007) |
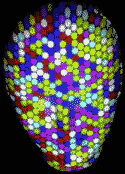
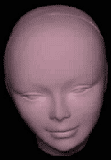
El objetivo fundamental de este proyecto es desarrollar un conjunto de técnicas que permitan la digitalización, reconstrucción y restauración virtual 3D de alta precisión de piezas de valor histórico o artístico. La motivación del proyecto es doble. Por una parte, recuperar las formas originales de objetos de importante valor histórico o artístico. Por otra, introducir tecnologías actuales de realidad virtual en nuestro entorno regional. Este objetivo llevará implícito una labor investigadora en procesamiento de imagen tridimensional e inteligencia artificial. Se ha colaborado con el Museo Nacional de Arte Romano (Mérida - Badajoz). Se aplicaron las técnicas desarrolladas en el proyecto sobre grupos escultóricos de indudable valor y de grandes dimensionales (para volúmenes de orden 3mx1mx4m) así como en esculturas de las que actualmente se tiene un conjunto de piezas inconexas, con el objetivo de proporcionar una reconstrucción sintética del objeto original. Finalmente los resultados obtenidos se traspasaron a esta entidad proporcionándoles una herramienta de gestión y visualización de los modelos así como reproducciones físicas de los mismos.

|
Diseño, desarrollo y aplicación de técnicas de reconstrucción y visualización de escenas 3D complejas mediante sensores de rango. CICYT, DPI2002-03999-C02-01 (2003-2005) |
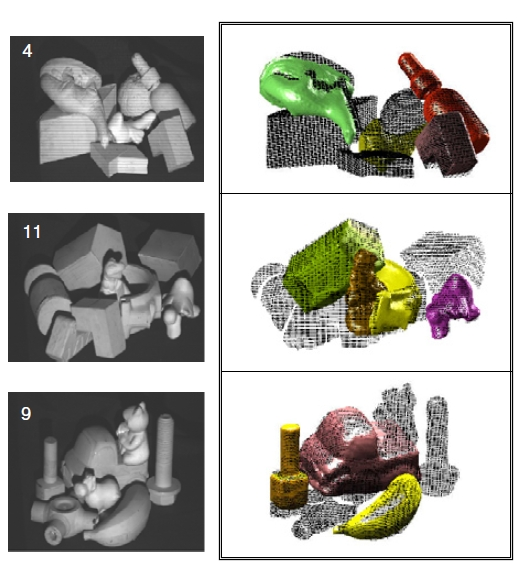
En este proyecto se aborda el tratamiento de escenas complejas 3D adquiridas mediante sensores de rango. Estas escenas están formadas por distintos objetos de forma libre situados en posiciones arbitrarias, donde se pueden producir fenómenos de oclusión entre ellos. Los objetivos del proyecto están planteados en varias etapas. Primero, desarrollo de nuevas técnicas de segmentación 3D de la escena para aislar los objetos que la forman. Segundo, desarrollo de nuevas técnicas de reconocimiento y localización espacial de objetos que permitan reconstruir la escena, utilizando modelos obtenidos a partir de datos de rango parciales. Como aplicación tecnológica del proyecto se desarrolló un entorno que permite la creación y representación virtual de la escena real a partir de la información obtenida en etapas anteriores. En el entorno virtual se incluye un robot virtual con el que simular distintas estrategias que permitan la planificación más adecuada de agarre de los objetos de la escena. Por último, se construyó una plataforma real con un robot manipulador y un sensor de rango donde se probaron los resultados obtenidos en el entorno virtual.
|
Estudio e implantación de un sistema de identificación personal basado en técnicas de correspondencia estéreo sobre imágenes de ambas manos.Aplicaciones a la interacción de robots manipuladores. PBAP-02-0058 (2002-2004) |
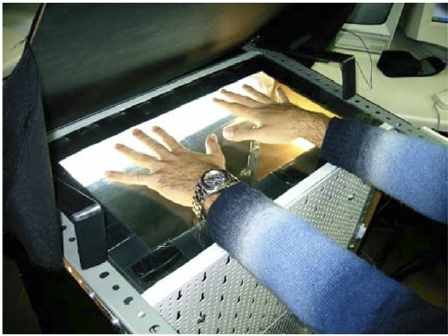
El presente proyecto se enmarca dentro del campo de identificación biométrica. En este contexto, los objetivos científicos del presente proyecto se centran, en primer lugar, en la definición de descriptores robustos a través de técnicas de inteligencia artificial y procesamiento de imagen de ambas manos humanas. A partir de los mismos, se definen códigos de identificación personal de gran distancia. Por lo tanto, un punto fuerte de investigación ha sido establecer descriptores basados en características que involucren las dos manos.
Para acometer este objetivo, y como aportación de tipo tecnológico, se ha desarrollado un sistema de identificación personal experimental robusto a través de visión por computador en dos fases. En la primera, se realizó una experimentación del sistema sobre la plataforma fija construida en laboratorio, considerando un número reducido de casos. Se refinó el sistema, tanto en su parte científica, como experimental durante los dos primeros años del proyecto. En la segunda fase, se construyó un prototipo portátil para la toma de imágenes en entornos externos al laboratorio. Este sistema se diseñó y utilizó durante la segunda parte del proyecto. Se realizó una validación del procedimiento sobre una muestra de 500 manos de jóvenes de un centro de enseñanza.
|
Técnicas de Adquisición de Información Tridimensional de Objetos Dinámicos Basadas en Proyección de Luz Estructurada Color. CICYT, DPI2001-0986 (2002-2004) |
El presente proyecto se enmarca dentro del campo de visión por computador y específicamente en el ámbito de creación de modelos geométricos a partir de información tridimensional. En este contexto, los objetivos científicos del presente proyecto se centran en la obtención de modelos dinámicos de sólidos con sensores basados en técnicas activas de proyección de luz estructurada en color.
Para acometer este objetivo, se ha desarrollado una nueva técnica de captación tridimensional rápida a través de proyección patrones de luz en color. Se estudiaron técnicas de modelado deformable y se definió un modelo dinámico de representación conectado con la información disponible. A la vez, se desarrolló una herramienta que de simulación, así como de visualización 3D de la escena dinámica real.
Como aplicación tecnológica y complemento al objetivo principal, se realizó la integración de un robot manipulador con el sistema sensorial de visión diseñado para acometer tareas de interacción en la escena dinámica real.